The Science of Flight: Understanding How Drones Fly
Drones use a clever method to control their flight. Traditional helicopters need mechanically complicated rotors whose blades can tilt during flight in order to control the orientation of the vehicle. However, multicopters avoid this complexity by instead using multiple fixed propellers. Simply by adjusting the speed (and therefore thrust) of each of the propellers independently, the aircraft can control its orientation during flight.
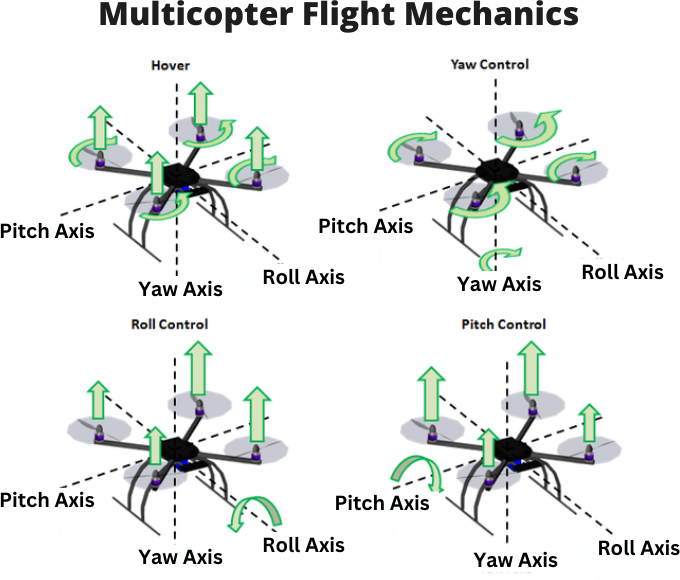
There are 3 axis an aircraft can rotate around: the roll(tilting left/right) axis, pitch(tilting forward/backward) axis, and the yaw(rotating to point to the right or to the left) axis. Here is how a drone controls its orientaiton along each axis.
-
Roll (tilting left/right): Speeds of propellers on one side increase, while the opposite side decreases. This creates more upward force on one side, making the drone rotate.
-
Pitch (tilting forward/backward): Speeds of the propellers at the front increase, while the speeds of the propellers at the back decrease (or vice versa). This produces more upward force in the front or the back, making the aircraft tilt forward or backward.
-
Yaw (rotating clockwise/counterclockwise): In a quadcopter drone, two propellers always spin clockwise, and the other two spin counterclockwise so that their twisting force is balanced during flight. To rotate around the yaw axis, the drone makes one set of propellers spin faster and the other set spin slower. This creates an imbalance in the twisting forces, causing the drone to rotate left or right along the yaw axis.
In this way, a drone can have full control of its flight, simply by carefully adjusting the speed of each propeller.
Flight Controller
Controlling flight in this way requires extremely precise and rapid adjustments to the speed of each propeller—far faster than any pilot could manage manually. This is why the flight controller is a critical component of the drone system. Acting as a small but powerful computer, the flight controller uses sensors to continuously monitor the drone’s orientation and stability. It processes this data in real-time, making precise adjustments to the propeller speeds to ensure the aircraft remains stable and responds accurately to the pilot’s commands.